CK3M a CK5M
Programovatelná víceosá řídicí jednotka
Víceosé řízení s nejkratší dobou cyklu serva 50 µs/5 os umožňuje přesné obrábění
- Řada procesorů pro regulátory pohybu s možností rozšíření:
CK3M (1,0 GHz, 2 jádra), CK5M (1,6 GHz, 4 jádra) - Lokální osy s nanometrickou přesností
- Ultrarychlé synchronní řízení (50 µs/5 os)
- Algoritmy uživatelské servoregulace
- Flexibilita při využití multidodavatelských akčních členů a n-kodérů
- Flexibilní programování ve skriptovacích jazycích G-code, ANSI C a PMAC
- Flexibilní konfigurace standardu EtherCAT
- Standardní komunikace TCP/IP Ethernet
- Otevřené protokoly: poskytovatel zpráv / příjemce zpráv MQTT a server OPC-UA, ethernetový IP adaptér a klient/server Modbus TCP
- Modulární provedení a montáž na DIN lištu
Specifikace & informace pro objednání
| Produkt | Type of module | CPU clock frequency | Max. number of axes via EtherCAT | Max. number of axis interface units | Amplifier interface | Encoder interface | Digital output type | Number of digital inputs | Number of digital outputs | Number of analog inputs | Popis | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
CK3M Motion Control CPU | 1.0 GHz | 0 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, No EtherCAT. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 4 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 4 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
CK3M Motion Control CPU | 1.0 GHz | 8 | 4 | 0 | 0 | 0 | CK3M CPU, 1 GB RAM, 1 GB Flash, 8 EtherCAT axes. Up to two axis interface units can be connected. Expansion units can be connected. |
|
|||
|
|
Analog I/O | 4 | CK3W Analog IN, 4 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Analog I/O | 8 | CK3W Analog IN, 8 points, +/-10 V, 16 bit (full scale) |
|
||||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, Digital encoder, DirectPWM, PNP |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | Filtered PWM | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (Filtered PWM), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | NPN | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, NPN Output type |
|
||||||
|
|
Axis interface | True DAC | Digital quadrature / Serial | PNP | CK3W 4 Axis Interface Unit, DA output (True DAC), Pulse + direction or phase difference, Pulse encoder / Serial encoder, PNP Output type |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | NPN | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, NPN |
|
||||||
|
|
Axis interface | DirectPWM output | Sinusoidal / Serial | PNP | CK3W 4 Axis Interface Unit, Sinusoidal encoder, DirectPWM, PNP |
|
||||||
|
|
Encoder input | Not Applicable | Special Serial Protocol | Encoder Input Unit for CK3M, Serial encoder 4 channels, BiSS-C, Endat2.2, and R88M-1Lx/-1Mx Motor built-in encoder |
|
|||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, TCR, XY2-100 | Laser Interface Unit for CK3M, XY2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100 | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output |
|
||||||
|
|
Laser interface | Not Applicable | Not Applicable | PWM, SL2-100, TCR | Laser Interface Unit for CK3M, SL2-100 Protocol, Laser PWM output and TCR Output |
|
||||||
|
|
Digital I/O | NPN | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, NPN |
|
||||||
|
|
Digital I/O | PNP | 16 | 16 | CK3W Digital IO, IN/OUT:16/16, PNP |
|
Potřebujete pomoc?
Jsme zde, abychom vám pomohli! Kontaktujte nás a naši specialisté vám pomohou najít nejlepší řešení pro vaše podnikání.
Kontaktujte nás CK3M a CK5M

Děkujeme Vám za odeslání vašeho požádavku. Budeme Vás kontaktovat co nejdříve.
Objevili se technické potíže. Odeslání Vašeho formuláře nebylo úspěšné. Prosím přijměte naši omluvu a zkuste to znovu později. Podrobnosti: [detaily]
Nabídka pro CK3M a CK5M
Vyplněním tohoto formuláře můžete požádat o cenovou nabídku vybraného produktu. Prosím vyplňte všechna povinná pole označená *. S vašimi osobními údaji bude nakládáno důvěrně.
Děkujeme Vám za vaši žádost o cenovou nabídku. Požadované informace Vám poskytneme co nejdříve.
Objevili se technické potíže. Odeslání Vašeho formuláře nebylo úspěšné. Prosím přijměte naši omluvu a zkuste to znovu později. Podrobnosti: [detaily]
Vlastnosti

Modulární provedení
Modulární provedení umožňuje modely CK3M a CK5M volně kombinovat.
Model CK3M versus CK5M
CK3M i CK5M jsou pokročilé řídicí jednotky pohybu se stejnou funkcí. Hlavní rozdíl spočívá v jejich jádrových procesorech: model CK3M má dvoujádrový procesor s frekvencí 1,0 GHz, zatímco model CK5M je vybaven výkonnějším čtyřjádrovým procesorem s frekvencí 1,6 GHz.
| Max. počet místních os | Max. počet os EtherCAT | |
|---|---|---|
| CK3M | 16 | 8 |
| CK5M | 32 | 32 |
Power PMAC IDE (integrované vývojové prostředí)
- Na základě platformy Microsoft® Visual Studio®
- Skriptovací jazyky G-Code, ANSI C a PMAC
- Snadné ladění
- Snadné nastavení
- Řešení problémů
- Ladicí program
Složitá kinematika
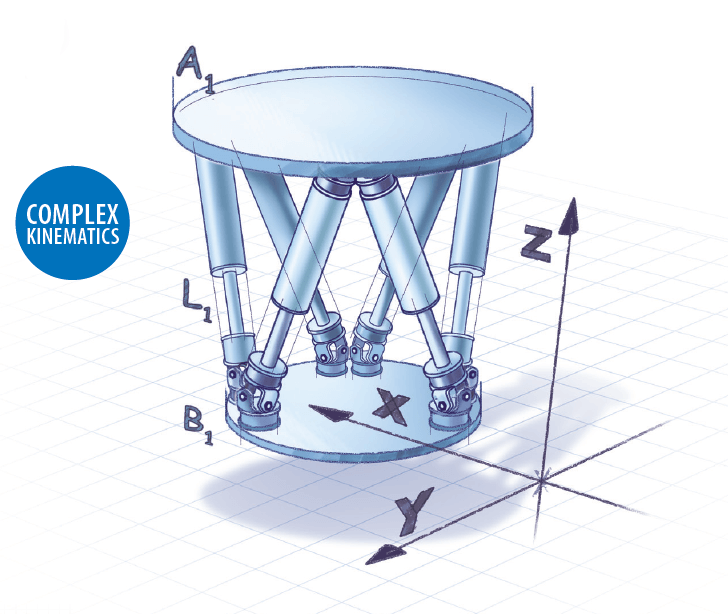
Řízení složité mechaniky je možné díky maticovému algoritmu a prostorové konverzi. Funkce pro kinematické řízení lze snadno použít i pro speciální aplikace jako nastavování polohy zrcadla teleskopu Hexapod.
Pomocné funkce pro přesné obrábění
G-kód
Standardní G-kód RS-274. Přepisovatelné podprogramy pro uživatelskou implementaci kódů G, M, T a D. Flexibilní syntaxe, možnost použití v kombinaci s libovolným CAD/CAM softwarem.
Kompenzace řezných hran ve 2D/3D
Kompenzace průměru a tvaru nástroje, nastavení břitu přesně podle G-kódu.
Rychlý procesor + velká programová mezipaměť
Rychlý procesor umožňuje zpracování více než 10 000 bloků za sekundu a vykonávání částí programů do velikosti 1 GB.
Zpětné provedení bloků pro obrácení směru dráhy
Možnost obrátit směr dráhy pro odsunutí nástroje z místa řezu.
Vylepšené předběžné zpracování bloků
Instrukce v mezipaměti jsou analyzovány s předstihem a pohyby jsou spojovány a optimalizovány z hlediska rychlosti i zrychlení, což zlepšuje výkon stroje.
Tečné řízení nástrojů
Nástroje se stanoveným směrem řezání vyžadují tečné řízení dráhy.
Software
Power PMAC IDE
Tento software slouží ke konfiguraci, vytváření uživatelských programů a ladění programů pro programovatelné víceosé řídicí jednotky NY51-A a CK3E.
Související produkty
-

Přesné ovládání pro širokou řadu aplikací s motorem
-

Programovatelná víceosá řídicí jednotka CK3E
-

Servo Sysmac pro všeobecné použití
-

Výkon a praktičnost pro řízení strojů
Stahování dokumentace









_getting_started_guide_en.jpg)